
|
|
|
|
|
|
|
|
|
|
|
|
Egwald Mathematics: Nonlinear Dynamics:
Egwald's popular web pages are provided without cost to users.
bifurcation definition | introduction | prototype bifurcations Definition: Bifurcation A differential equation system undergoes a bifurcation when a qualitative change in its orbit structure appears, as one or more parameters of the dynamical system are changed. Bifurcation theory studies structurally unstable dynamical systems. Dynamic stability refers to perturbations in the phase space—the stability of fixed points and limit cycles. Structural stability refers to perturbations in the function space—the topological stability of orbit structures (Medio 55-69). Introduction: Describe the dynamics of a two dimensional, continuous time process by a pair of differential equations and initial conditions:
dx / dt = f(x, y, α), (1) whose solution, x(t, α) and y(t, α), is a pair of continuous functions of time t, that also depend on the parameter, α. One Parameter Prototype Bifurcations Structurally unstable dynamic systems can be classified according to the number of parameters that appear in the differential equations describing the system's dynamics. The following examples are one parameter systems, and are the two dimensional analogues to the one dimensional normal forms for one dimensional bifurcations. The uncoupled differential equations for the saddle-node, transcritical, and pitchfork bifurcations have the form:
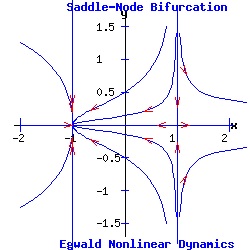
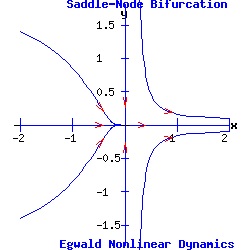
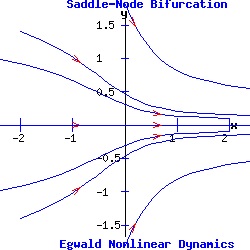
dx / dt = f(x, y, α) = f(x, α), (4) Consequently, each system's fixed points occur along the x-axis. Furthermore, the solutions to the second differential equations have the exponential form: y(t) = e-t * y0 with solution trajectories decaying to the x-axis through time. Example: Saddle-Node Bifurcation The saddle-node prototype system is:
dx / dt = f(x, y) = a * α + b * x2, (7) This system's fixed points are:
(x1, y1) = ( sqrt( (-a / b) * α ), 0 ), Letting a = 1, b = 1, the x-component of a fixed point is a real number if α <= 0. The Jacobian matrix is:
Thus, p = trace(J) = -1 + 2 * b * x, and q = det(J) = -2 * b * x. Let a = 1, b = 1. For α = -1, the first fixed point is an attractor with eigenvalues μ1 = -1 and μ2 = -2; meanwhile, the second fixed point is a saddle point with eigenvalues μ1 = 2 and μ2 = -1. For α = 0, the origin is a double fixed point with eigenvalues μ1 = 0 and μ2 = -1, attracting initial points with a non-positive y-component. For α > -1, there are no real fixed points.
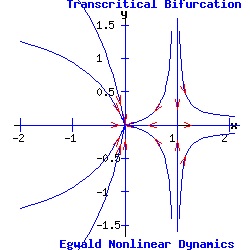
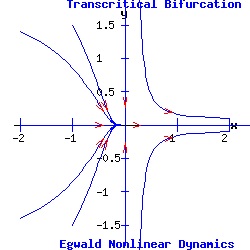
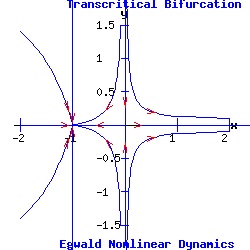
Example: Transcritical Bifurcation The transcritical prototype system is:
dx / dt = f(x, y) = a * α * x + b * x2, (9) This system's fixed points are:
(x1, y1) = ( 0, 0 ), The Jacobian matrix is:
Thus, p = trace(J) = -1 + a * α + 2 * b * x, and q = det(J) = -a * α - 2 * b * x. Let a = 1, b = 1. For α = -1, the first fixed point is an attractor with eigenvalues μ1 = -1 and μ2 = -1; meanwhile, the second fixed point is a saddle point with eigenvalues μ1 = 1 and μ2 = -1. For α = 0, the origin is a double fixed point with eigenvalues μ1 = 0 and μ2 = -1, attracting initial points with a non-positive y-component. For α = 1, the first fixed point, (x1, y1), is a saddle-node, and the second fixed point, (x2, y2), is an attractor.
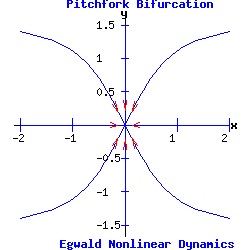
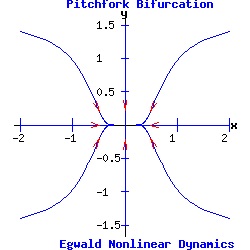
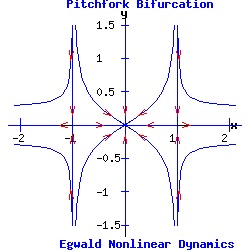
Example: Pitchfork Bifurcation The pitchfork prototype system is:
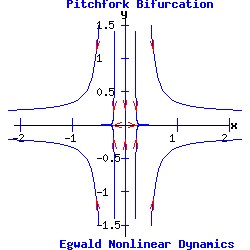
dx / dt = f(x, y) = a * α * x + b * x3, (11) Supercritical Pitchfork Bifurcation In the normal form of a supercritical pitchfork bifurcation, the coefficient b in equation (11) is negative. Consequently, the cubic term stabilizes the dynamic process by pulling the trajectory of x(t) toward the stable fixed point(s).
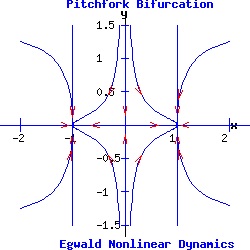
Subcritical Pitchfork Bifurcation In the normal form of a subcritical pitchfork bifurcation, the coefficient b in equation (11) is positive. Consequently, the cubic term destabilizes the dynamic process by driving the trajectory of x(t) toward infinity.
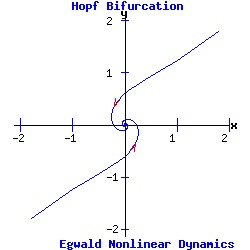
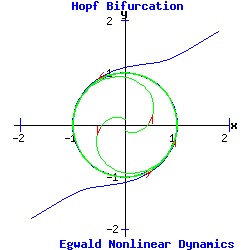
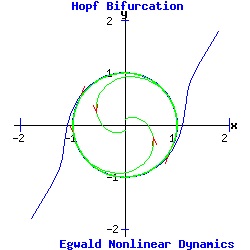
The heteroclinic line joining the two saddle points when α < 0 collapses as the saddle points collide when α passes through 0. The Hopf Bifurcation With the saddle-node, transcritical, and pitchfork bifurcations, the stable fixed point has p = trace(J) < 0, and q = det(J) > 0. Its eigenvalues are real and negative ( lie in the left half-plane). As α varies for the transcritical and pitchfork bifurcations, one eigenvalue becomes positive, turning the fixed point into a saddle-node. With Hopf bifurcations, the fixed point's eigenvalues are complex conjugates, µ1 and µ2. In a supercritical Hopf bifurcation, as the parameter α varies a stable node with Re(µ1, 2) < 0 turns unstable with Re(µ1, 2) > 0, while simultaneously a stable limit-cycle emerges. In a subcritical Hopf bifurcation, as α varies an unstable node with Re(µ1, 2) > 0 turns stable with Re(µ1, 2) < 0, while simultaneously the unstable limit-cycle disappears. Example: Supercritical Hopf Bifurcation Consider the nonlinear system with functions f and g given by:
dx / dt = f(x, y) = - y + x * (α - (x2 + y2)), This system has a fixed point at (x*, y*) = (0, 0). The Jacobian matrix at the fixed point is:
Since p = trace(J) = 2 * α, and q = det(J) = α2 + 1 > 0, the fixed point (0, 0) is a hyperbolic attractor with eigenvalues μ1 = -1/2 + i and μ2 = -1/2 - i if α = -.5 < 0; a hyperbolic repeller with eigenvalues μ1 = 1 + i and μ2 = 1 - i if α = 1 > 0; and a non-hyperbolic fixed point if α = 0. (See the topological classification of fixed points.) As α increases past 0, the fixed point at the origin switches from attractor to repeller and a stable limit cycle (attractor) emerges for α > 0.
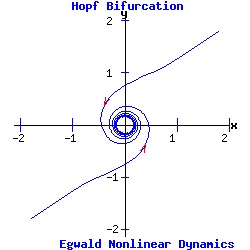
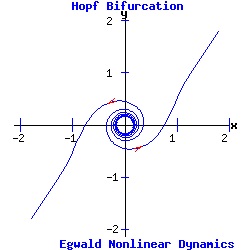
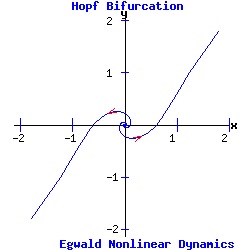
Example: Subcritical Hopf Bifurcation Consider the nonlinear system with functions f and g given by:
dx / dt = f(x, y) = - y + x * (α + (x2 + y2)), This system has a fixed point at (x*, y*) = (0, 0). The Jacobian matrix at the fixed point is:
Since p = trace(J) = 2 * α, and q = det(J) = α2 + 1 > 0, the fixed point (0, 0) is a hyperbolic attractor with eigenvalues μ1 = -1 + i and μ2 = -1 - i if α = - 1 < 0; a hyperbolic repeller with eigenvalues μ1 = 1/2 + i and μ2 = 1/2 - i if α = .5 > 0; and a non-hyperbolic fixed point if α = 0. (See the topological classification of fixed points.) Although this Jacobian is the same as the Jacobian of the dynamic system with a supercritical Hopf bifurcation, the orbit structure revealed in the next diagram is topologically different from the supercritical orbit structure. For α < 0, the unstable limit cycle (repeller) surrounds the attracting fixed point at the origin. As α increases past 0, the fixed point at the origin switches from attractor to repeller and the limit cycle disappears.
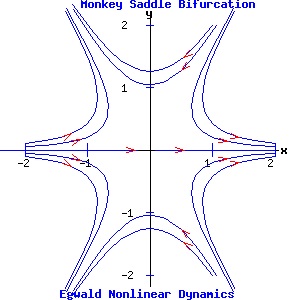
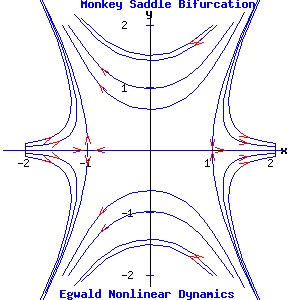
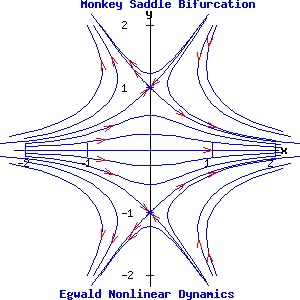
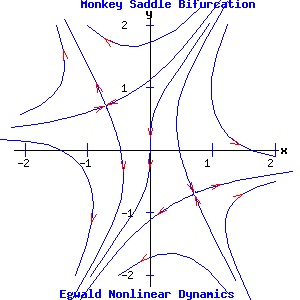
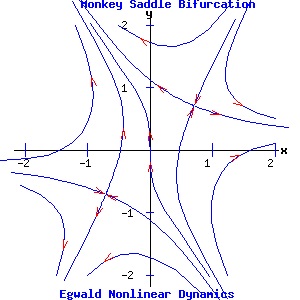
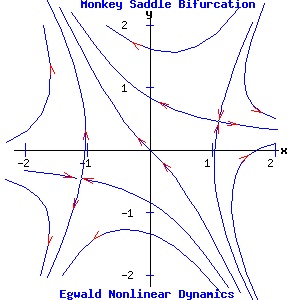
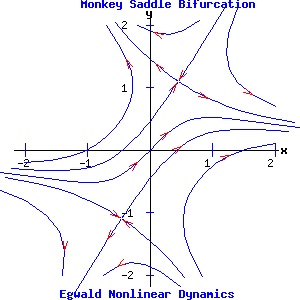
Two Parameter Bifurcations Monkey Saddle Bifurcation The differential equations controlling the dynamics of the monkey saddle and its bifurcations:
dx / dt = f(x, y) = x2 - y2 + α, have two parameters, α and β. The system's Jacobian matrix is:
α = 0, β = 0: the system has a double fixed point at the origin. Since the Jacobian evaluated at the origin has all zero entrees, p = trace(J) = 0, and q = det(J) = 0. Consequently, both eigenvalues are zero and the origin is a non-hyperbolic fixed point. α = -1, β = 0: the fixed points are (1, 0) and (-1, 0). The Jacobian evaluated at either fixed point has p = 0 and q = -4. Consequently, the fixed points are saddle points, joined by a heteroclinic trajectory from (1, 0) to (-1, 0). α = 1, β = 0: the fixed points are (0, 1) and (0, -1). The Jacobian evaluated at either fixed point has p = 0 and q = -4. Consequently, the fixed points are saddle points. α = 0, β = -1: the fixed points are (-1/2*√2, 1/2*√2) and (1/2*√2, -1/2*√2). The Jacobian evaluated at either fixed point has p = 0 and q = -4. Consequently, the fixed points are saddle points. α = 0, β = 1: the fixed points are (1/2*√2, 1/2*√2) and (-1/2*√2, -1/2*√2). The Jacobian evaluated at either fixed point has p = 0 and q = -4. Consequently, the fixed points are saddle points. α = -1, β = 1: the fixed points are (1.0987, 0.4551) and (-1.0987, -0.4551). The Jacobian evaluated at either fixed point has p = 0 and q = -5.6569. Consequently, the fixed points are saddle points. α = 1, β = 1: the fixed points are (0.4551, 1.0987) and (-0.4551, -1.0987). The Jacobian evaluated at either fixed point has p = 0 and q = -5.6569. Consequently, the fixed points are saddle points.
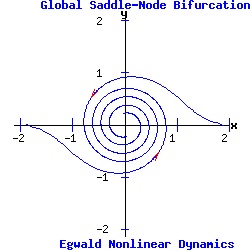
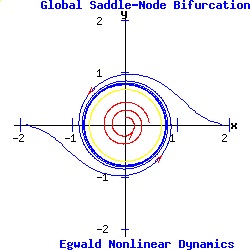
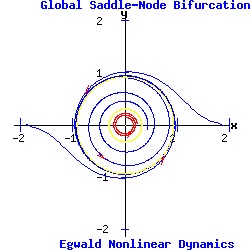
Global Bifurcations (Strogatz 260-265) Global Bifurcations involve changes to the orbit structure of the dynamic system that leave the underlying fixed points and their topological stability properties unchanged. Global Saddle-Node (Fold) Bifurcation Express the system in polar coordinates, where r = distance of a point from the origin, and θ = the angle from the x-axis to the line joining the point to the origin, measured counterclockwise. The parameter α of the dynamic system:
dr / dt = α * r + r3 - r5, (13) determines the global bifurcation. The system has a fixed point attractor at the origin. As α increases, a half-stable limit cycle appears, which splits into a smaller unstable limit cycle, and a larger stable limit cycle. In the example below with a = 2 and b = .1, the limit cycle appears with radius r = .70711 at the critical parameter value of αc = -.25. For α = -.1 > αc, the radii of the limit cycles are r1 = .335711, and r2 = .941965. As α increases, the fixed point at the origin continues as an attractor.
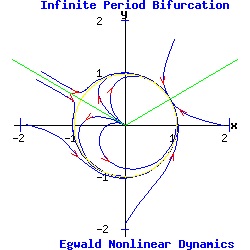
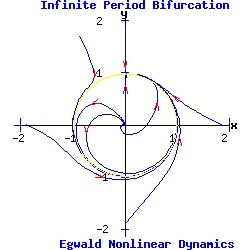
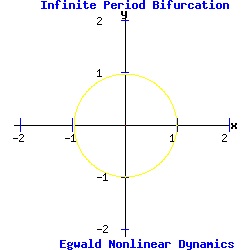
Equation (13) as a one dimensional system undergoes a type-two saddle-node bifurcation for r > 0. Infinite-Period Bifurcation In polar coordinates, the uncoupled system is:
dr / dt = r * (1 - r2), (15) Equation (15) is a one dimensional system with stable fixed points at r1 = -1, and r2 = 1, separated by an unstable fixed point at the origin where r* = 0 (type two pitchfork bifurcation). Equation (16) is a one dimensional nonuniform oscillator, exhibiting the properties of a type one saddle-node bifurcation. When α > 1, counterclockwise flow varies with the value of θ, having a maximum at θ = -pi / 2, and a minimum at θ = pi / 2. When α = αc = 1, equation (16) has a half-stable fixed point on the unit circle at θ = pi / 2. For α < 1, the fixed point splits into a stable fixed point and a second unstable fixed point on the unit circle.
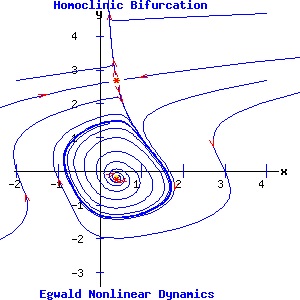
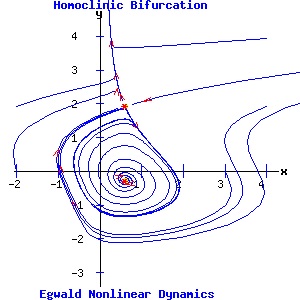
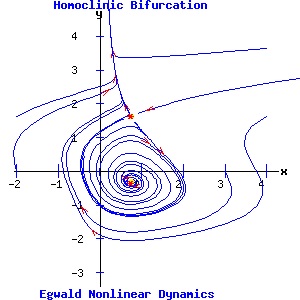
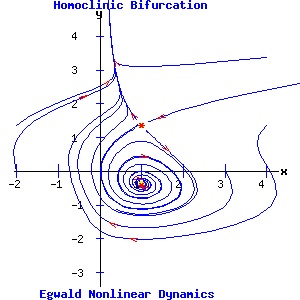
Homoclinic (Saddle-Loop, Blue Sky) Bifurcation The saddle-node and infinite period bifurcations involve the bifurcation of limit cycles around an attractor (saddle-node) or repeller (infinite period). The saddle-loop bifurcation involves the interaction between a saddle point and a limit cycle. As a parameter varies, the unstable manifold of the saddle point feeding onto the limit cycle turns into a homoclinic orbit, and destroys the limit cycle. In Cartesian coordinates, the system is (Medio 169-171):
d x / dt = a * y + b * x * (c - y2), (15) The fixed points of this system are:
(x1, y1) = ( α, (1/(2 * b * α)) * (a + sqrt(a2 + 4 * b2 * α2 * c)) ), The Jacobian matrix is:
The example in the diagrams below sets a = 0.7, b = 0.7, and c = .5. The control parameter is α. Initially for α = .4, the system has a saddle point and an attracting limit cycle enclosing a repeller. As α increases, the fixed points move closer to each other, but maintain their properties. At values of α below the critical value, αc, one unstable manifold of the saddle point feeds onto the limit cycle. At α = αc = .75, this manifold forms a homoclinic orbit, merging with the limit cycle, and terminating at the saddle point. For α > αc, the limit cycle is destroyed as the unstable manifold bypasses the saddle point, converging with the saddle point's other unstable manifold.
References.
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||

|

